

















 29 / 52
29 / 52

|29 |
aviso 1 | 2015
DIGITALE WELTEN
COLLOQUIUM
über große Strecken verlagert werden
sollen, bietet sich die sogenannte Dis-
traktionsosteogenese an, bei der ebenso
zunächst eine Osteotomie (s.o.) erfolgt.
Der in Fehlstellung befindliche Bereich
wird jedoch nicht auf einmal, sondern
schrittweise, d. h. ca. 1 mm pro Tag, in
die korrekte Position verschoben. Nach
computertomographischer Bildgebung,
Import der CT-Daten in eine geeignete
Software und Erstellung eines virtuellen
3D-Modelles kann die Umstellung fehl-
positionierter Segmente entsprechend
demPrinzip des Computer Aided Design
(CAD) erfolgen. Für eine exakte Vorher-
sage des Gesichtsprofils ist es mittler-
weile möglich, digitale 3D-Fotografien
in die Planungssoftware zu integrieren
und mit einem korrespondierenden CT-
Datensatz zu fusionieren. Zudem kön-
nen ebenfalls klassische Parameter zur
Schädelvermessung (Kephalometrie)
durch die Planungssoftware angezeigt
werden, was die Diagnostik und thera-
peutische Entscheidungsfindung wei-
ter unterstützt. Wiederum können zur
intraoperativen Unterstützung Schnei-
deschablonen, »Cutting-guides«, erstellt
werden, um die geplanten Osteotomien
(s.o.) exakt an den Stellen durchzufüh-
ren, die in der virtuellen Planung festge-
legt wurden. Auch okklusale Splints, die
bei Ober- und/oder Unterkieferumstel-
lungen die Neupositionierung der Kie-
fer über die Zahnflächen verschlüsseln,
können volldigitalisiert CAD-CAM-ge-
fertigt werden. Von großem Wert kann
die computer-basierte Planung und OP-
Umsetzung auch bei der korrekten Posi-
tionierung und Ausrichtung von Distrak-
toren sein. Nicht zuletzt können auch
Gesichtsepithesen, d. h. künstlich nach-
gebildete Gesichtsteile wie Nase, Auge
oder Ohr, durch computer-gestützte Ver-
fahren formgetreu angefertigt und an
der richtigen Stelle positioniert werden.
NICHT NUR DIE
unmittelbare OP-
Planung und OP-Durchführung profi-
tiert von digitalen Technologien. Diese
können auch dazu genutzt werden, um
Patienten das zu erwartende Ergebnis
zu simulieren. Werden CT-Aufnahmen
nach demEingriff durchgeführt und mit
dem virtuell geplanten Ergebnis vergli-
chen, ist es möglich die Genauigkeit der
Planung im Nachhinein zu überprüfen.
Dr. Florian Probst
hat das Doppelstudium Medizin
und Zahnmedizin an der TU München und LMU Mün-
chen absolviert, ist Facharzt für Mund-, Kiefer- und
Gesichtschirurgie und leitet mit
Professor Dr. Dr.
Carl-Peter Cornelius
die Arbeitsgruppe »Compu-
ter-gestützte Chirurgie« an der Klinik für Mund-,
Kiefer- und Gesichtschirurgie der LMU München.
Professor Dr. Dr. Michael Ehrenfeld
ist Direktor
der Klinik.
Navigation und Robotik
Weitere Entwicklungsstufen auf demWeg zur exak-
ten intraoperativen Umsetzung einer virtuellen Pla-
nung in der Mund-, Kiefer- und Gesichtschirurgie
sind die intraoperative Navigation und chirurgische
Robotik. Bei der intraoperativen Navigation erfolgt
zunächst der Import eines CT-Datensatzes in ein
Navigationssystem, gefolgt von der Anbringung
künstlicher Landmarken (Tracker) am Gesichts-
schädel und an den Navigationsinstrumenten so-
wie die Erfassung dieser Landmarken z. B. über ein
Infrarotsystem. Nach erfolgreicher Referenzierung
des CT-Datensatzes mit der Patientenanatomie
kann die eigentliche Navigation beginnen. Dabei
erscheinen dem Chirurgen die jeweiligen referen-
zierten Instrumente in Relation zur Bildgebung und
damit zur Anatomie des Patienten. Neuere Modi-
fikationen der Technik erlauben eine Echtzeitpo-
sitionierung (Real Time Tracking) von navigierten
Implantaten, beispielsweise von Titanimplantaten
zur Rekonstruktion der knöchernen Augenhöhle.
Der Einsatz von OP-Robotern in der Kiefer- und
Gesichtschirurgie ist prinzipiell möglich, muss der-
zeit jedoch noch als experimentell angesehen wer-
den. Neuerungen auf diesem Gebiet werden mit
Spannung erwartet.
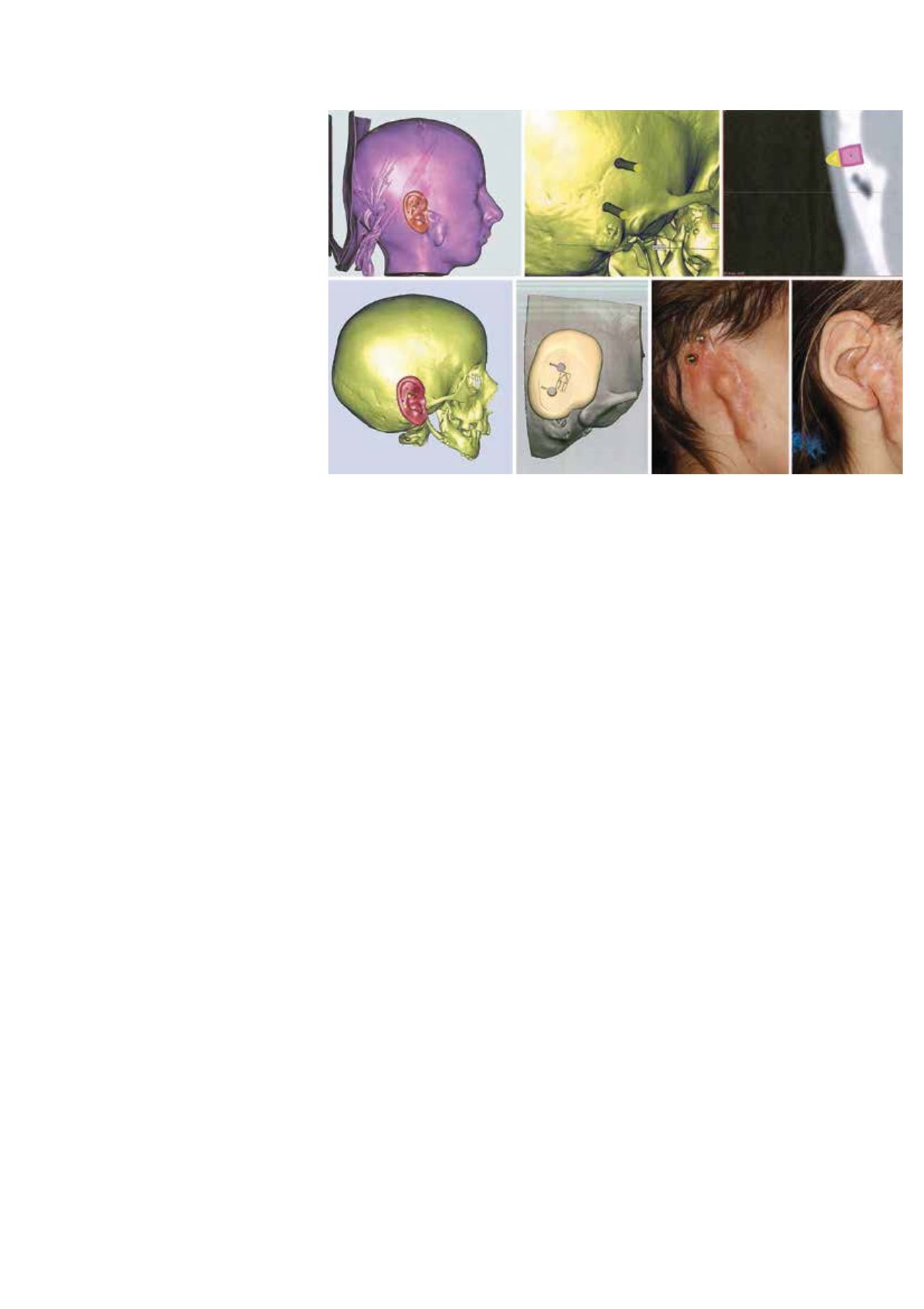
oben links
Kind mit angeborener syndromaler
Fehlbildung. Das rechte Ohr ist fehlgebil-
det und zu tief bzw. zu weit vorne positioniert.
Es ist die Anfertigung einer Ohrepithese
geplant. Anhand virtueller Planung erfolgen die
Spiegelung des Ohres der Gegenseite
und die seitensymmetrische Neupositionie-
rung (Ohr rot dargestellt).
oben mittig
Auf der Basis der festgelegten
neuen Ohrposition wird die Positionierung von
zwei Implantaten passgenau geplant,
die später der Verankerung der Ohrepithese
dienen.
oben rechts
Festlegung der Länge der
Verankerungsimplantate in Abhängigkeit der
Dicke des Schädelknochens.
unten links
Neu geformte und positionierte
Ohrepithese (rot) in Relation zum knöchernen
Schädel mit Darstellung der Implantate (gelb).
Unten mittig
CAD-CAM-gefertigte Schab-
lone zur Übertragung der virtuell geplanten
Implantatposition in die OP-Situation.
unten rechts
Am Patienten inserierte Implan-
tate und fertige, aufgesetzte Ohrepithese
(rechte Abbildung).